Enhancing Industrial Automation with Customized End of Arm Tooling (EOAT)
What is End of Arm Tooling?
End of Arm Tooling refers to the devices attached to the end of a robotic arm that perform specific tasks such as gripping, lifting, or assembling. These tools are essential for improving productivity and precision in automated systems. Our EOAT solutions are customisable, enabling seamless integration with your existing robotic systems.
Benefits of Choosing Our End of Arm Tooling Solutions
Air System Controls provides a range of advantages for your end of arm tooling (EOAT) needs:
Custom Solutions: Our expert team designs tailored EOAT tools that meet your specific operational requirements, ensuring seamless integration and optimal performance.
Quality Assurance: We utilize high-quality materials and advanced technology to ensure the durability and reliability of our EOAT systems, even in demanding environments.
Enhanced Efficiency: Our EOAT solutions streamline automation processes, significantly reducing cycle times and increasing overall productivity across various industries, including automotive, food and beverage, and pharmaceuticals.
Comprehensive Services: We offer end-to-end support, including:
Design and Development: Collaborate with our experienced engineers to create custom EOAT solutions.
Installation and Support: Benefit from our complete installation services and ongoing technical support.
Maintenance and Repair: Keep your EOAT systems in peak condition with our dedicated maintenance and repair services.
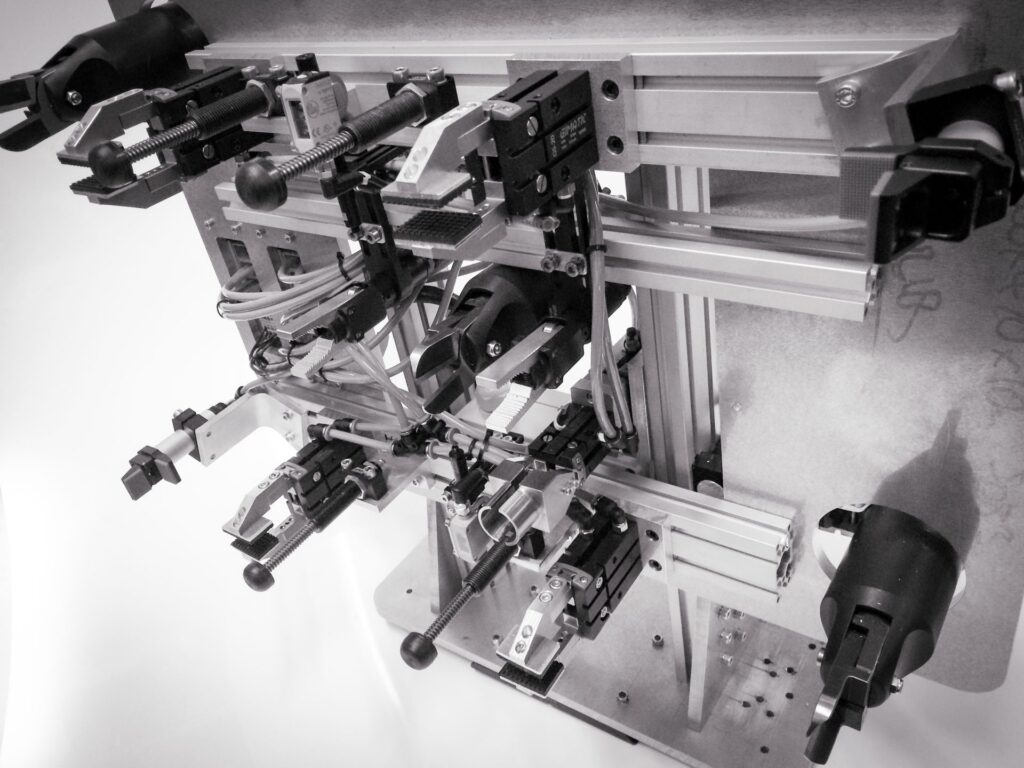
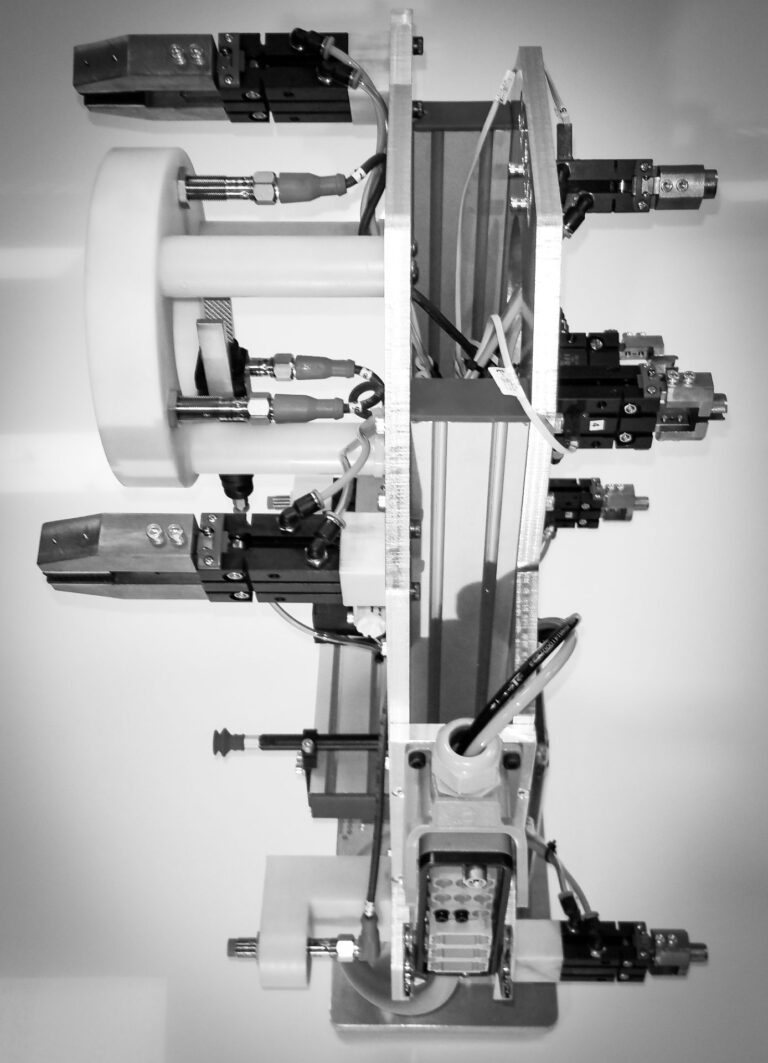
Precision Grippers for Automation
Our extensive range of gripping and sensing systems empowers industrial robots to pick and place objects efficiently. We offer various gripper styles to accommodate diverse applications:
Vacuum Cups: Utilising suction technology, our vacuum grippers provide reliable handling for uneven surfaces and objects with varying shapes, making them ideal for delicate or irregular items.
Mechanical Grippers: Our two and three-jaw mechanical grippers function like flexible “fingers,” excelling at grasping and manipulating objects. Equipped with adjustable force and stroke capabilities, they ensure precise and controlled handling.
Adhesive Grippers: Designed for lightweight objects, adhesive grippers use an adhesive surface to securely hold items during robotic operations, making them ideal for sensitive materials.
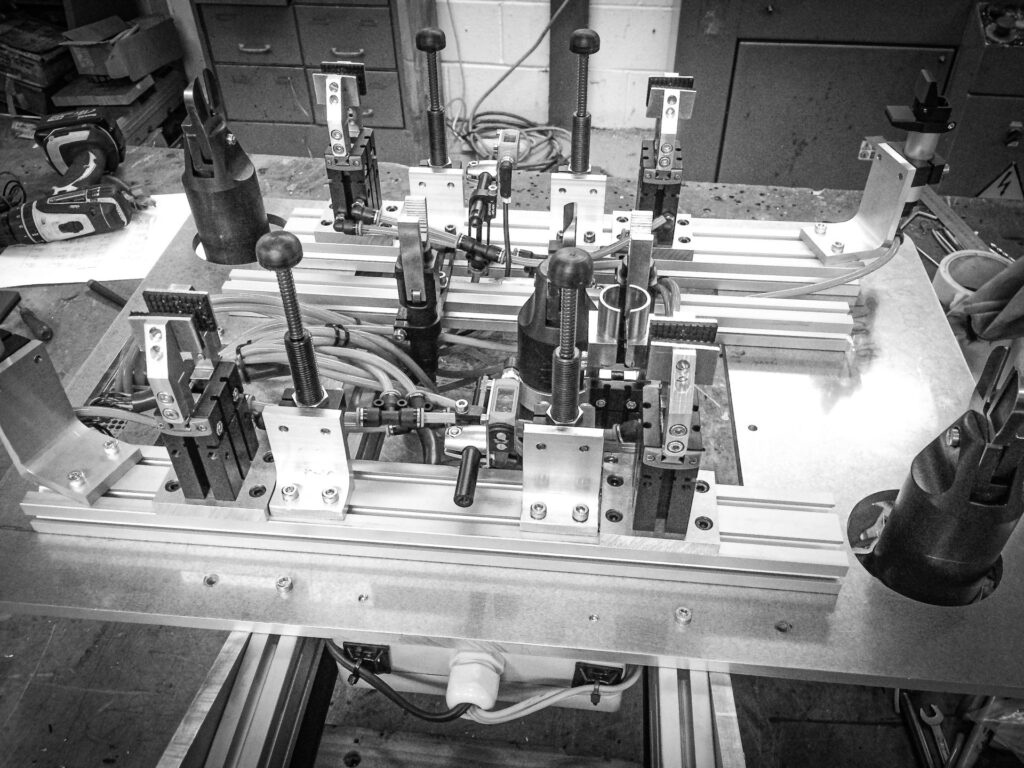
Quick Change Devices for Enhanced Efficiency
Our specially designed quick change devices significantly improve efficiency and productivity on assembly lines. These tools allow for rapid transitions between different applications—such as drills, grinders, or saws—enabling your operations to adapt quickly to varying production needs.
Advanced Sensing Capabilities
Integrating sensing capabilities with our EOAT solutions adds an extra layer of functionality to your automation processes. By incorporating sensors, we can:
Monitor and inspect materials and components during production.
Ensure quality and precision by providing real-time feedback.
Enhance safety and control when handling delicate or fragile items.
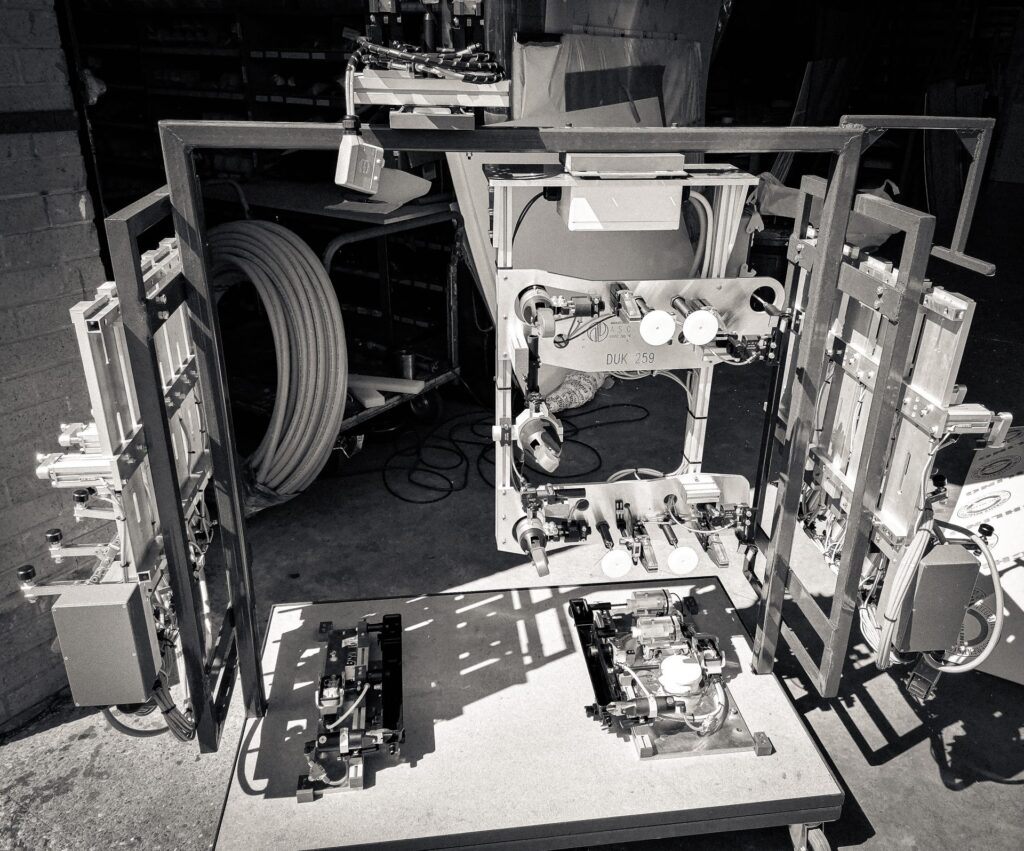
Common Applications for End of Arm Tooling (EOAT)
Our versatile End of Arm Tooling (EOAT) solutions are designed to enhance a wide range of industrial processes, including:
Assembly: Streamline the assembly line by efficiently handling and positioning components for faster production cycles.
Cutting: Achieve precise cutting and trimming operations with robotic accuracy to minimise waste and maximise efficiency.
Packing: Optimise your packaging processes by swiftly and accurately placing items into containers, ensuring consistent and reliable results.
Inspection: Improve quality control with robotic systems that inspect and verify products during production, maintaining high standards.
Machine Loading: Boost productivity by automating the loading of materials onto machines and production lines, reducing manual labour and errors.
Polishing: Automate polishing tasks to achieve consistent, flawless finishes every time.
Welding Control: Enable precise control and movement of welding torches for accurate and efficient welds in various applications.
Collision Sensors: Incorporate collision sensors into your EOAT solutions to prevent accidents and protect equipment during robotic operations.